Ulike motorer er nødvendige på mange felt, inkludert de velkjentesteppermotorerog servomotorer. Mange brukere forstår imidlertid ikke hovedforskjellene mellom disse to motortypene, så de vet aldri hvordan de skal velge. Så hva er hovedforskjellene mellomsteppermotorerog servomotorer?
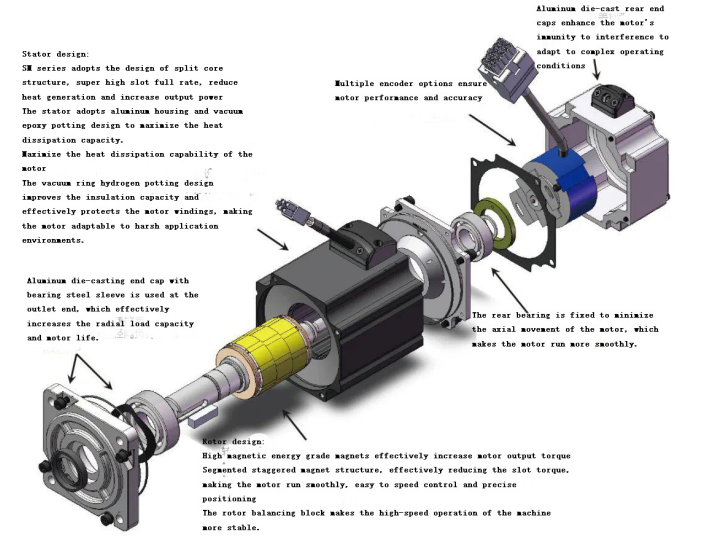
Servomotor
1. Arbeidsprinsipp
Disse to motorene er svært forskjellige i prinsippet. En steppermotor er et elektrisk pulssignal som forskyver deler av steppermotoren i en åpen sløyfe, enten vinkelformet eller lineær. Se steppermotorens virkemåte.
Og servoen er hovedsakelig avhengig av pulser for å posisjonere seg. Servomotoren har i seg selv som funksjon å sende ut pulser. Så hver rotasjon i en vinkel sender servomotoren ut det tilsvarende antallet pulser, slik at servomotoren danner et ekko eller en lukket sløyfe for å motta pulsene. Systemet vet tydelig hvor mange pulser som sendes og mottas, og kan dermed kontrollere motorens rotasjon nøyaktig for å oppnå nøyaktig posisjonering.
2. Kontrollnøyaktighet
Presisjonen til en steppermotor oppnås vanligvis ved presis kontroll av trinnvinkelen, som har mange forskjellige underinndelte gir for å oppnå presis kontroll.
Servomotorens kontrollnøyaktighet garanteres av rotasjonsgiveren på bakenden av motorakselen, og servomotorens kontrollnøyaktighet er generelt høyere enn for steppermotorer.
3. Hastighet og overbelastningskapasitet
Steppermotorer er utsatt for lavfrekvente vibrasjoner ved lav hastighet, så når steppermotoren arbeider ved lav hastighet, må den vanligvis også bruke dempeteknologi for å overvinne fenomenet med lavfrekvente vibrasjoner, for eksempel ved å legge til dempere på motoren eller drive ved hjelp av underoppdelingsteknologi, etc. Selv om dette fenomenet ikke forekommer i servomotoren, bestemmer dens lukkede sløyfe-kontrollegenskaper dens høyhastighetsdrift for å opprettholde utmerket ytelse. Momentfrekvensegenskapene til de to er forskjellige, og generelt er servomotorens nominelle hastighet større enn steppermotorens.
Utgangsmomentet til steppermotoren avtar når hastigheten øker, mens servomotoren har et konstant dreiemomentutgang, så steppermotoren har generelt ingen overbelastningskapasitet, mens AC-servomotoren har en sterkere overbelastningskapasitet.
4. Løpeytelse
Steppermotorer er generelt åpne-sløyfe-kontroll. Ved for høy startfrekvens eller for stor belastning vil det oppstå utagering eller plugging. Derfor må man håndtere hastighetsproblemer eller øke encoderens lukkede sløyfe-kontroll. Se hva en lukket-sløyfe-steppermotor er. Servomotorer bruker lukket sløyfe-kontroll, noe som er enklere å kontrollere og uten tap av trinn.
5. Kostnad
Steppermotorer er fordelaktige når det gjelder kostnadseffektivitet. For å oppnå samme funksjon, er prisen høyere enn for samme effektsteppermotorer. Servomotorens høye respons, høye hastighet og fordelene med høy presisjon bestemmer den høye prisen på produktet, noe som er uunngåelig.
Kort sagt, det er store forskjeller mellom steppermotorer og servomotorer når det gjelder både arbeidsprinsipp, kontrollnøyaktighet, overbelastningskapasitet, driftsytelse og kostnad. Men de to har sine egne fordeler, og brukere som ønsker å velge mellom dem må kombinere deres faktiske behov og bruksscenarier.
Publisert: 09. november 2022