Lukket sløyfesteppermotorerhar endret forholdet mellom ytelse og kostnad i mange bevegelseskontrollapplikasjoner. Suksessen til VIC-motorene med lukket sløyfe har også åpnet for muligheten til å erstatte kostbare servomotorer med rimeligesteppermotorerI et økende antall industrielle automatiseringsapplikasjoner med høy standard endrer teknologiske fremskritt forholdet mellom ytelse og kostnad mellom trinnmotorer og servomotorer.
Steppermotorer kontra servomotorer
I følge allmennkunnskap yter servostyringssystemer bedre i applikasjoner der hastigheter over 800 o/min og høy dynamisk respons er nødvendig. Steppermotorer er mer egnet for applikasjoner med lavere hastigheter, lav til middels akselerasjon og høyt holdemoment.
Så hva er grunnlaget for denne konvensjonelle visdommen om steppermotorer og servomotorer? La oss analysere den mer detaljert nedenfor.
1. Enkelhet og kostnad
Steppermotorer er ikke bare billigere enn servomotorer, de er også enklere å sette i drift og vedlikeholde. Steppermotorer er stabile ved stillstand og holder posisjonen sin (selv med dynamiske belastninger). Men hvis høyere ytelse er nødvendig for visse applikasjoner, må dyrere og mer komplekse servomotorer brukes.
2. Struktur
Steppermotorerroterer trinnvis, ved hjelp av magnetiske spoler for gradvis å trekke en magnet fra én posisjon til den neste. For å bevege motoren 100 posisjoner i hvilken som helst retning, krever kretsen at 100 trinnoperasjoner utføres på motoren. Stegmotorer bruker pulser for å oppnå trinnvise bevegelser, noe som muliggjør presis posisjonering uten bruk av tilbakemeldingssensorer.
Servomotorens bevegelsesmetode er annerledes. Den kobler en posisjonssensor – dvs. en encoder – til den magnetiske rotoren og registrerer kontinuerlig motorens nøyaktige posisjon. Servoen overvåker forskjellen mellom motorens faktiske posisjon og den kommanderte posisjonen og justerer strømmen deretter. Dette lukkede systemet holder motoren i riktig bevegelsestilstand.

3. Hastighet og dreiemoment
Forskjellen i ytelse mellom stepper- og servomotorer stammer fra deres forskjellige motordesignløsninger.Steppermotorerhar et mye større antall poler enn servomotorer, så en full omdreining av en steppermotor krever mange flere viklingsstrømutvekslinger, noe som resulterer i et raskt fall i dreiemoment ved økende hastigheter. I tillegg, hvis maksimalt dreiemoment nås, kan steppermotoren miste sin hastighetssynkroniseringsfunksjon. Av disse grunnene er servomotorer den foretrukne løsningen i de fleste høyhastighetsapplikasjoner. I motsetning til dette er det høyere antallet poler til en steppermotor fordelaktig ved lavere hastigheter, når steppermotoren har en dreiemomentfordel over en servomotor av samme størrelse.
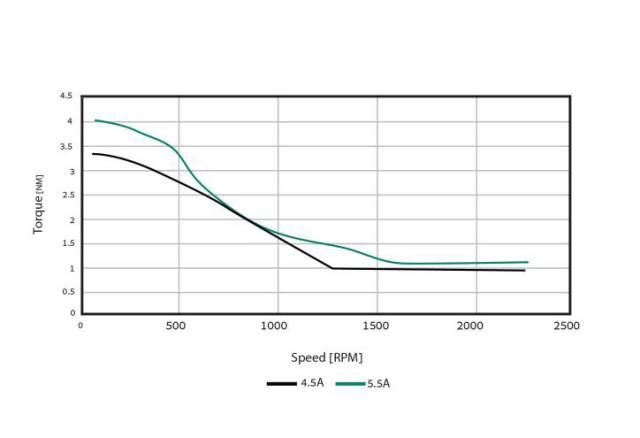
Etter hvert som hastigheten øker, reduseres dreiemomentet til steppermotoren
4. Posisjonering
Det er viktige forskjeller mellom steppermotorer og servomotorer i applikasjoner der maskinens nøyaktige posisjon må være kjent til enhver tid. I applikasjoner med åpen sløyfe som styres av steppermotorer, antar kontrollsystemet at motoren alltid er i riktig bevegelsestilstand. Etter at et problem har oppstått, for eksempel en motor som har stoppet på grunn av en fastkjørt komponent, kan imidlertid ikke kontrolleren vite maskinens faktiske posisjon, noe som kan føre til tap av posisjon. Selve servomotorens lukkede sløyfesystem har en fordel: hvis den blir blokkert av en gjenstand, vil den oppdage det umiddelbart. Maskinen vil stoppe å fungere og vil aldri være ute av posisjon.
5. Varme- og energiforbruk
Åpne steppermotorer bruker en fast strøm og avgir mye varme. Lukket sløyfe-kontroll gir bare strømmen som kreves for hastighetssløyfen og unngår derfor problemet med motoroppvarming.
Sammenligningssammendrag
Servostyringssystemer er best egnet for høyhastighetsapplikasjoner som involverer dynamiske lastendringer, for eksempel robotarmer. Stepperstyringssystemer er derimot mer egnet for applikasjoner som krever lav til middels akselerasjon og høyt holdemoment, for eksempel 3D-skrivere, transportbånd, subakser osv. Fordi steppermotorer er billigere, kan de redusere kostnadene for automatiseringssystemer når de brukes. Bevegelsesstyringssystemer som trenger å dra nytte av egenskapene til servomotorer, må bevise at disse dyrere motorene er verdt sin vekt i gull.
Steppermotorer med lukket sløyfekontroll
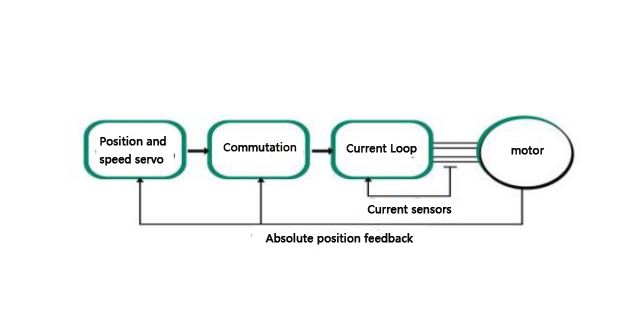
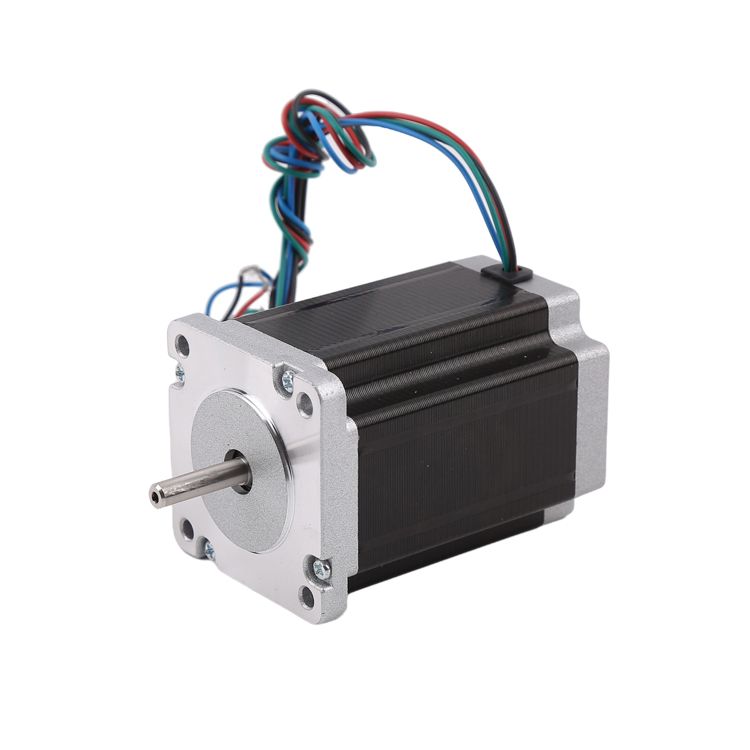
Steppermotoren med integrert elektronisk styring tilsvarer en tofaset børsteløs likestrømsmotor og kan utføre posisjonssløyfekontroll, hastighetssløyfekontroll, DQ-kontroll og andre algoritmer. En absolutt endreier brukes til lukket sløyfekommutering, og sikrer dermed optimalt dreiemoment ved alle hastigheter.
Lavt energiforbruk og kjølig kjøling
VIC-steppermotorer er svært energieffektive. I motsetning til åpne steppermotorer, som alltid opererer med full strømstyring og forårsaker varme- og støyproblemer, endres strømmen i henhold til de faktiske bevegelsesforholdene, for eksempel under akselerasjon og retardasjon. I likhet med servoer er strømmen som forbrukes av disse steppermotorene til enhver tid proporsjonal med det faktiske dreiemomentet som kreves. Fordi motoren og det integrerte elektroniske kontrollkortet kjører kjøligere, kan VIC-steppermotorer oppnå høyere toppmomenter sammenlignet med servomotorer.
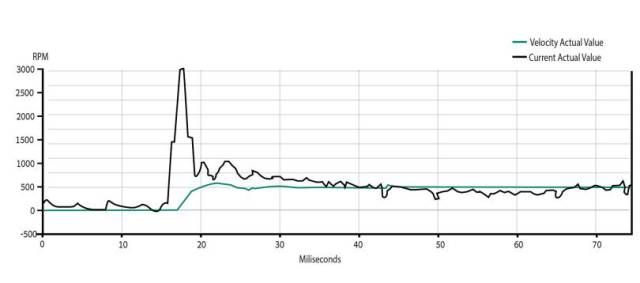
Selv ved høye hastigheter krever VIC-steppermotorer mindre strøm
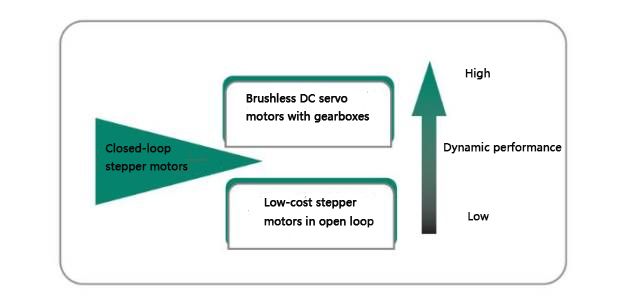
Drevet av fremskritt innen lukket sløyfeteknologi, er steppermotorer i stand til å trenge inn i høyytelses- og høyhastighetsapplikasjoner som tidligere utelukkende tilhørte servomotorer.
Steppermotorer med lukket sløyfeteknologi
Hva om fordelene med lukket servoteknologi kunne brukes på steppermotorer?
Kan vi oppnå sammenlignbar ytelse med servomotorer, samtidig som vi realiserer kostnadsfordelene med trinnmotorer?
Ved å kombinere lukket sløyfe-kontrollteknologi, vil steppermotoren bli et omfattende produkt med fordelene til både servo- og steppermotorer til lav kostnad. Fordi lukkede steppermotorer tilbyr betydelige forbedringer i ytelse og energieffektivitet, kan de erstatte dyrere servomotorer i et økende antall høystandardapplikasjoner.
Følgende er et eksempel på en VIC-integrert steppermotor med innebygd lukket sløyfekontroll for å forklare ytelsen og fordeler og ulemper med steppermotorer med lukket sløyfeteknologi.
Nøyaktig tilpassede ytelseskrav
For å sikre tilstrekkelig dreiemoment til å overvinne forstyrrelser og unngå tapte trinn, må åpne steppermotorer vanligvis sørge for at dreiemomentet er minst 40 % høyere enn verdien som kreves av applikasjonen. Lukkede steppermotorer i dag har ikke dette problemet. Når disse steppermotorene stopper på grunn av overbelastning, vil de fortsette å holde lasten uten å miste dreiemoment. De vil fortsette å fungere etter at overbelastningstilstanden er fjernet. Maksimalt dreiemoment kan garanteres ved en gitt hastighet, og posisjonssensoren sikrer at det ikke er noe tap av trinn. Lukkede steppermotorer kan derfor spesifiseres for å nøyaktig matche dreiemomentkravene til den aktuelle applikasjonen uten behov for en ytterligere margin på 40 %.
Med åpne steppermotorer er det vanskelig å oppfylle høye momentkrav på grunn av risikoen for tapte trinn. Sammenlignet med konvensjonelle steppermotorer kan VIC lukkede steppermotorer oppnå svært rask akselerasjon, lav driftsstøy og lav resonans. De kan operere med mye høyere båndbredder og oppnå utmerket ytelse.
Ikke noe kabinett
Toda integrerer drivverkets kontrollkort med motoren, noe som reduserer mengden kabling og forenkler implementeringsløsningen. Med Toda kan du bygge maskiner uten kabinetter.
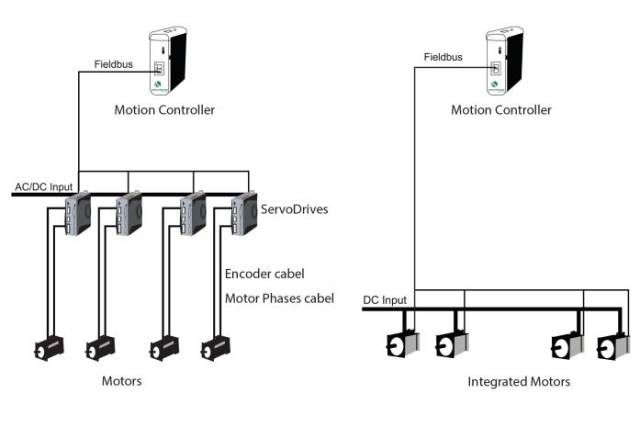
Integrering av elektronikk med steppermotorer reduserer kompleksiteten
Med lukket sløyfe-teknologi tilbyr lukkede steppermotorer brukerne utmerket nøyaktighet og effektivitet, med ytelsen til en servomotor og den lave kostnaden til en steppermotor. Lavere steppermotorer trenger gradvis inn i applikasjoner som ellers ville blitt dominert av dyrere servomotorer.
Publisert: 10. april 2023