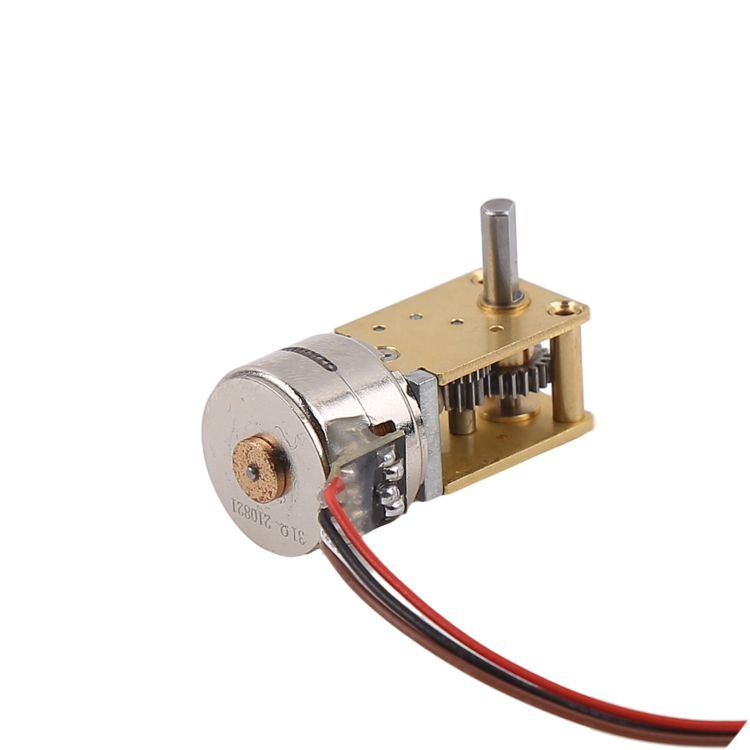
Snekkegirsgir består av en snekke og et snekkehjul, og generelt er snekken den aktive delen. Snekkegiret har samme høyre- og venstregjenger, som kalles henholdsvis høyre- og venstresnekkehjul. En snekke er et gir med en eller flere spiralformede tenner som går i inngrep med snekkehjulet for å danne et forskjøvet akselgirpar. Indekseringsflaten kan være sylindrisk, konisk eller sirkulær, og det finnes fire kategorier: Arkimedes-snekke, evolvent snekke, normal rettprofilsnekke og konisk, omsluttende sylindrisk snekke.
Fordeler med snekkegirkasse.
✦ En-trinns girkasseforholdet er stort, vanligvis i = 10 ~ 100. I indeksmekanismen for kraftoverføring kan maksimumet være over 1500.
✦ Den samme nettingen er lineær kontakt, som tåler stor effekt.
✦ Kompakt struktur, jevn overføring og lav støy.
✦ Når løftevinkelen til snekken er mindre enn den tilsvarende friksjonsvinkelen mellom girene, er den selvlåsende med motslag, dvs. at bare snekken kan drive snekkehjulet, ikke snekkehjulet.
Ulemper med snekkegirdrift.
✦Med to akser vinkelrett er den lineære hastigheten til de to hjulnodene vinkelrett, slik at den relative glidehastigheten er stor, lett å varme opp og slite.
✦Lav effektivitet, vanligvis 0,7 til 0,8; snekkegir med selvlåsende snekkegir er enda mindre effektive, vanligvis mindre enn 0,5.
Gjør ensnekkegir steppermotornødvendigvis ha selvlåsende ytelse?
Nei, det finnes forutsetninger. Når stigningsvinkelen er < friksjonsvinkelen,snekkegir steppermotorkan være selvlåsende.
Vanligvis når man velger en trinnmotor for girreduksjon, må brukeren bruke strømbruddbeskyttelse eller bremsemotor. Derfor vil girreduksjonsmotoren velges med en brems for å oppnå formålet med å stoppe, men det betyr ikke absolutt stopp, det er fortsatt litt treghet.
Hva er selvlåsende?Konseptet med selvlåsing er at uansett hvor mye kraft som ikke kan startes, uansett hvor mye treghet, så lenge arbeidet til den aktive delen stopper, kan hele maskinen bremse. Snekkegirmotorer har denne selvlåsende ytelsen. Det er ingen selvlåsende ytelse for girmotorer, og det er pålitelig selvlåsende ytelse for snekkegirreduksjoner med hastighetsforhold på 1:30 og over, og jo større reduksjonsforhold, desto bedre selvlåsende ytelse.
Hvordan velge reduksjonsforhold for å sikre selvlåsende ytelse til snekkemotorens trinnmotor?
1. Snekkegirets friksjonskoeffisient er 0,6, snekkegirets føringsvinkel er mindre enn 3°29′11″, det vil si selvlåsende, og omvendt.
2. Snekkegirets friksjonskoeffisient er 0,7, snekkegirets føringsvinkel er mindre enn 4°03′57″, det vil si selvlåsende, og omvendt.
3. Når friksjonskoeffisienten til snekkehjulet er 0,8, er snekkens stigningsvinkel mindre enn 4°38′39″, det vil si selvlåsende, og omvendt.
Når snekkens stigningsvinkel er mindre enn den tilsvarende friksjonsvinkelen mellom tennene på det inngripende hjulet, har reduksjonssteppermotormekanismen selvlåsing, som kan oppnå omvendt selvlåsing, det vil si at bare snekken kan drive snekkehjulet, men ikke snekkehjulet driver snekken. Generelt i design av tunge maskiner har designere en tendens til å bruke snekkegirmekanismen med selvlåsing, fordi dens omvendte selvlåsing kan spille en svært viktig rolle i sikkerhetsbeskyttelse.
Beregningsformel for snekkehjul og snekkegir.
1. Utvekslingsforhold = antall snekkegirtenner ÷ antall snekkehoder
2. Senteravstand = (snekkehjulsstigning + snekkegirstigning) ÷ 2
3. Snekkehjulets diameter = (antall tenner + 2) × modulus
4. Snekkehjulsavstand = modul × antall tenner
5. Ormbredde = ormens ytre diameter - 2 × modul
6. Snekkeføring = π × modul × hode
7. Helixvinkel (styrevinkel) tgB = (modul × hodetall) ÷ ormens stigning
8. Snekkeledning = π × modul × hode
9, Modulus = diameter på indekseringssirkelen / antall tenner
Antall ormhoder: enhodet orm (det er bare én spiral på ormen, dvs. ormen roterer i én uke og ormehjulet roterer gjennom én tann); tohodet orm (det er to spiraler på ormen, dvs. ormen roterer i én uke og ormehjulet roterer gjennom to tenner).
Modulus er størrelsen på spiralen på skruen, dvs. jo større modulen er, desto større er spiralen på skruen.
Diameterfaktoren er tykkelsen på skruen.
Modul: Indekseringssirkelen til et gir er referansepunktet for å designe og beregne dimensjonene til hver del av giret, og omkretsen av girindekseringssirkelen = πd = zp, slik at diameteren til indekseringssirkelen er
d=zp/π
Siden π er et irrasjonelt tall i ligningen ovenfor, er det ikke praktisk å plassere indekssirkelen som referanse. For å lette beregning, produksjon og inspeksjon er forholdet p/π nå kunstig spesifisert som noen enkle verdier, og forholdet kalles modulus (modul), uttrykt som m.
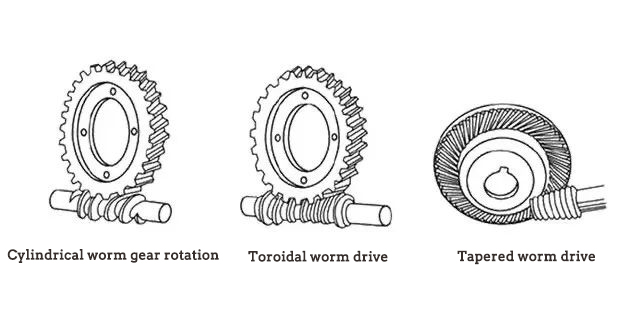
Typer snekkegir
I henhold til de forskjellige formene på ormen, kan ormen deles inn i sylindrisk ormedrift, ringformet ormedrift og konisk ormedrift. Blant dem er den sylindriske ormedriften den mest brukte.
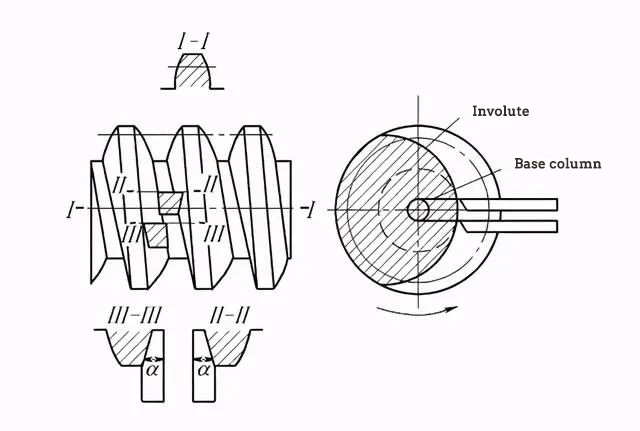
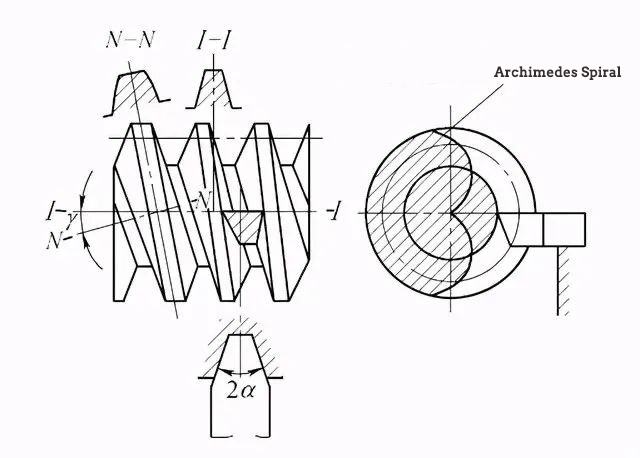
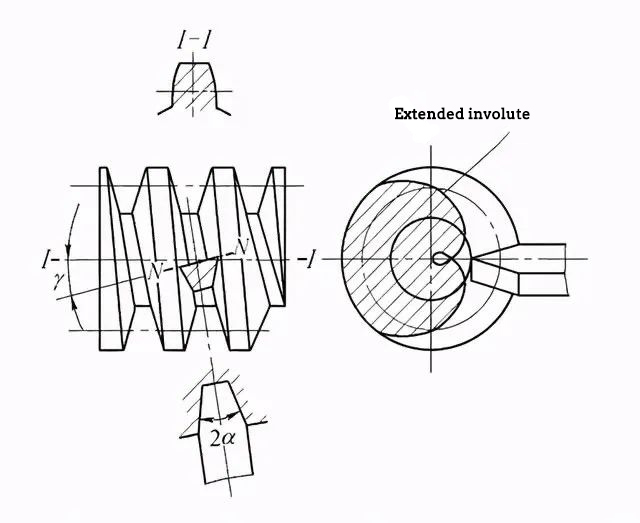
Vanlige sylindriske snekkegir freses for det meste på dreiebenk med et dreieverktøy med et rett busblad. Med variasjon av verktøyets monteringsposisjon og verktøyet som brukes, kan man få fire typer snekkegir med forskjellige tannprofiler i tverrsnittet av den vertikale aksen: evolvente snekkegir (ZI-type), Arkimedes-snekkegir (ZA-type), vanlige rette profilerte snekkegir (ZN) og koniske, omsluttende sylindriske snekkegir (ZK).
Involvert orm (ZI-type)- bladplanet er tangentielt til snekkebasesylinderen, og endetennene er evolvente, egnet for høyere hastighet og større effekt.
Arkimedisk orm (type ZA)- Tannprofilen vinkelrett på akseplanet er en arkimedisk skrue, og tannprofilen i planet forbi aksen er rett, enkel bearbeiding og lav nøyaktighet. (Aksial rettprofil snekkegir).
Normal rettprofilsnekke (ZN)- kan brukes til å slipe tenner med modifisert slipeskive, prosesseringen er enkel, ofte brukt til flerhodede snekker, overføringseffektivitet opptil 0,9.
Siden du har en kort forståelse av overføringenprinsippet omsnekkegirmotorer, hvis det er noe annet du ønsker å kommunisere, vær så snillkontakt oss!
Vi samarbeider tett med kundene våre, lytter til deres behov og handler ut fra deres forespørsler. Vi tror at grunnlaget for et vinn-vinn-partnerskap er produktkvalitet og kundeservice.
Changzhou Vic-tech Motor Technology Co., Ltd. er en profesjonell forsknings- og produksjonsorganisasjon som fokuserer på motorforskning og -utvikling, helhetlige løsninger for motorapplikasjoner, samt prosessering og produksjon av motorprodukter. Ltd. har spesialisert seg på produksjon av mikromotorer og tilbehør siden 2011. Våre hovedprodukter: miniatyrsteppermotorer, girmotorer, girmotorer, undervannspropeller og motordrivere og -kontrollere.

Teamet vårt har over 20 års erfaring med design, utvikling og produksjon av mikromotorer, og kan utvikle produkter og bistå designkunder i henhold til spesielle behov! For tiden selger vi hovedsakelig til kunder i hundrevis av land i Asia, Nord-Amerika og Europa, som USA, Storbritannia, Korea, Tyskland, Canada, Spania, osv. Vår forretningsfilosofi om «integritet og pålitelighet, kvalitetsorientert» og verdinormer om «kunden først» forfekter ytelsesorientert innovasjon, samarbeid og effektiv bedriftsånd for å etablere en «bygg og del»-strategi. Det endelige målet er å skape maksimal verdi for kundene våre.
Publisert: 30. januar 2023